
Mkarazzipuzz schrieb: Etwas ernster:
Ich habe, wie an anderer Stelle schon mal gesagt, einmal ein wenig gewühlt und bin verschiedentlich fündig geworden. Es ist wohl Alles in der Wundertüte, aber auf das terrestische System noch nichts wirklich in der Tüte. Es muss sich ja rechnen. Ich erinnere in diesem Zusammenhang an das Iridium-System. Also Satelliten sind angedacht, die sowohl direkt mit dem Handy sprechen (dafür braucht es eigentlich Parabolspiegel) als auch über Basisstationen (mit DVB-S2 und besser). Die Sendeleistung der Handys zum Erreichen der Satelliten dürfte interessant sein. Auf der Erde wird von Groß nach klein verteilt. Große Basisstationen die mit fetten Sende/Empfangsanlagen arbeiten und kleinerer Basisstationen versorgen (hohe Masten-hohe Sendeleistung mit den berüchtigten Keulen). Die kleineren Basisstationen verteilen dann ihre Fracht über Koax-Kabel an die die kleinen Receiver, die mit begrenzten Leistungen arbeiten dürften. Dessen ungeachtet aber große Mikrowellen (ohne Abschirmung mit Metallgittern) sind.
Das ist es also, was ich so in begrenzter Zeit rausbekommen habe. Die zwei PDF dazu sind im ersten Beitragsfaden von Thom enthalten. Die sind zwar von den Bildchen und Fotos her zwar interessant aber für Laien selbst mit gutem Englisch nicht lesbar.
Gruß
krazzi
Voraussichtlich findet sich auf bb kaum ein Leser ein, welcher mit dem Geschreibe was anfangen kann. Trotzdem habe ich mir die Schweinemühe gemacht, Formeln und Tabellen, zu kopieren und korrekt einzusetzen, für den Fall, dass doch, vielleicht, ein Genie kommt, dem der Text weiterhilft.
Thom Ram, 15.10.07
.
1
Architectures and Key Technical Challenges for
5G Systems Incorporating Satellites
.
A. Guidotti, Member, IEEE, A. Vanelli-Coralli, Senior Member, IEEE, M. Conti,
S. Andrenacci, Member, IEEE, S. Chatzinotas, Senior Member, IEEE N. Maturo, B. Evans, Senior
Member, IEEE A. Awoseyila, Member, IEEE A. Ugolini, T. Foggi, L. Gaudio, N. Alagha, Member, IEEE
S. Cioni, Senior Member, IEEE
.
Abstract
Satellite Communication systems are a promising solution to extend and complement terrestrial networks in unserved
or under-served areas. This aspect is reflected by recent commercial and standardisation endeavours. In particular,
3GPP recently initiated a Study Item for New Radio-based, i.e., 5G, Non-Terrestrial Networks aimed at deploying satellite
systems either as a stand-alone solution or as an integration to terrestrial networks in mobile broadband and machine-type
communication scenarios. However, typical satellite channel impairments, as large path losses, delays, and Doppler shifts,
pose severe challenges to the realisation of a satellite-based NR network. In this paper, based on the architecture options
currently being discussed in the standardisation fora, we discuss and assess the impact of the satellite channel characteristics
on the physical and Medium Access Control layers, both in terms of transmitted waveforms and procedures for enhanced
Mobile BroadBand (eMBB) and NarrowBand-Internet of Things (NB-IoT) applications. The proposed analysis shows that the
main technical challenges are related to the PHY/MAC procedures, in particular Random Access (RA), Timing Advance (TA),
and Hybrid Automatic Repeat reQuest (HARQ) and, depending on the considered service and architecture, different solutions
are proposed.
.
.
I NTRODUCTION
A
N ever growing demand for broadband high-speed, heterogeneous, ultra-reliable, secure, and low latency services
recently started being experienced in wireless communications. These drivers require enhancements to devices,
services, and technologies that are currently well established in the global market, as for instance the 3GPP Long Term
Evolution standard. Thus, the definition of new standards and technologies, known as 5G, has become of outmost
importance in order to introduce novel techniques and technologies that can support the fulfillment of the significantly
demanding requirements as well as to support novel market segments. The massive scientific and industrial interest in 5G
communications is in particular motivated by the key role that these future system will play in the global economic and
societal processes to support the next generation vertical services, e.g., Internet of Things, automotive and transportation
sectors, e-Health, Industry 4.0, etc., [1], [2].
Unlike previous standards, which can be seen as general-purpose technologies to which the different services were
tailored and adjusted, the next 5G standard is expected to be able to provide tailored and optimised support for a plethora
of services, traffic loads, and end-user communities. Such a technology revolution can only be achieved by means of a
radical shift in the way both the access and the core network are designed. This heterogeneous and optimised framework
is reflected in the challenging requirements that 5G systems are expected to meet, e.g., large throughput increase (the target
peak data rate should be 20 Gbps in the downlink and 10 Gbps in the uplink), global and seamless connectivity, reliability
( 99.999% of successful packet reception), and connection density ( 1 million devices per square km), amongst others, [3].
In this context, the integration of satellite and terrestrial networks can be a cornerstone to the realisation of the foreseen
heterogeneous global system. Thanks to their inherently large footprint, satellites can efficiently complement and extend
dense terrestrial networks, both in densely populated areas and in rural zones, as well as provide reliable Mission Critical
services. The definition of the new 5G paradigm provides a unique opportunity for the terrestrial and satellite communities
to define an harmonised and fully-fledged architecture, differently from the past when terrestrial and satellite networks
evolved almost independently from each other, leading to a difficult a posteriori integration. This trend is substantiated
by 3GPP Radio Access Network (RAN) and Service and system Aspects (SA) activities, in which a new Study Item has
• Alessandro Guidotti is the corresponding author. E-mail: a.guidotti@unibo.it
• Alessandro Guidotti, Alessandro Vanelli-Coralli, and Matteo Conti are with the Department of Electrical, Electronic, and Information Engineering (DEI)
“Guglielmo Marconi,” Univ. of Bologna, Italy.
Stefano Andrenacci, Symeon Chatzinotas, and Nicola Maturo are with the Interdisciplinary Centre for Security, Reliability and Trust (SnT), Univ. of
Luxembourg, Luxembourg.
Barry Evans and Adegbenga Awoseyila are with the Institute for Communication Systems (ICS), University of Surrey, Guildford, UK.
Alessandro Ugolini and Lorenzo Gaudio are with Department of Engineering and Architecture, Univ. of Parma, Italy.
Tommaso Foggi is with CNIT Research Unit, Department of Engineering and Architecture, Univ. of Parma, Italy.
Nader Alagha and Stefano Cioni are with European Space Agency – esa.int, ESTEC/TEC-EST, Noordwijk, The Netherlands.2
recently started on Non-Terrestrial Networks (NTN) for 5G systems, [4], [5]. The role of NTN in 5G systems is expected to
be manifold, including: i) the support to 5G service provision in both un-served areas that cannot be covered by terrestrial
5G networks (isolated/remote areas, on board aircrafts or vessels) and underserved areas (e.g., sub-urban/rural areas); ii)
improve the 5G service reliability thanks to a better service continuity, in particular for mission critical communications or
Machine Type Communications (MTC) and Internet of Things (IoT) devices, M2M/IoT devices or for passengers on board
moving platforms; and iii) to enable the 5G network scalability by providing efficient multicast/broadcast resources for data
delivery. In addition to the 3GPP standardisation effort, which will be further detailed in this paper, also funded projects
are currently addressing SatCom-based 5G systems, as, for instance: i) the EC H2020 project VITAL (VIrtualized hybrid
satellite-Terrestrial systems for resilient and fLexible future networks), in which the combination of terrestrial and satellite
networks is addressed by bringing Network Functions Virtualization (NFV) into the satellite domain and by enabling
Software-Defined-Networking (SDN)-based, federated resources management in hybrid SatCom-terrestrial networks, [6];
ii) the EC H2020 project Sat5G (Satellite and Terrestrial Network for 5G), which aims at developing a cost-effective SatCom
solution by means of satellite gateway and terminal virtualisation and use cases demonstration [7]; iii) the ESA project
SATis5 (Demonstrator for Satellite Terrestrial Integration in the 5G Context), in which a set of relevant satellite use cases for
5G in the areas of enhanced Mobile BroadBand (eMBB) and massive IoT deployments will be demonstrated, [8]; and iv)
the H2020 project SANSA (Shared Access Terrestrial-Satellite Backhaul Network enabled by Smart Antennas), aimed at to
enhancing the performance of mobile wireless backhaul networks, both in terms of capacity and resilience, while assuring
an efficient use of the spectrum, [9].
In the above context for worldwide 5G systems, the integration of terrestrial systems with Geostationary Earth Orbit
(GEO) satellites would be beneficial for global large-capacity coverage, but the large delays in geostationary orbits pose
significant challenges, as will be also highlighted in this work. In [10]–[12], resource allocation algorithms for multicast
transmissions and TCP protocol performance were analysed in a Long Term Evolution (LTE)-based GEO system, providing
valuable solutions. However, to avoid the above issues, significant attention is being gained by Low Earth Orbit (LEO) mega-
constellations, i.e., systems in which hundreds of satellites are deployed to provide global coverage, as also demonstrated
by recent commercial endeavours. In [13], [14], a mega-constellation of LEO satellites deployed in Ku-band to provide
LTE broadband services was proposed and the impact of typical satellite channel impairments as large Doppler shifts and
delays was assessed with respect to the PHY and MAC layer procedures. The introduction of SatCom in 5G systems has
been preliminarily addressed by the authors in [15], [16], in which the focus was on the PHY and MAC layer techniques
that shall cope with satellite channel impairments. However, these works are based on several assumptions due to the fact
that the 3GPP standardisation for SatCom-based 5G was still in its infancy. 3GPP studies and activities are now providing
significant results and critical decisions have been made on the PHY and MAC layers for the New Radio (NR) air interface.
In particular, the first PHY standard has been made available and preliminary analyses related to the deployment of 5G
systems through SatCom are advancing. In this context, it is of outmost importance to assess the impact that these new
requirements will have on future 5G Satellite Communications (SatCom). To this aim, in this paper, we move from the
analysis performed in [13]–[16] and assess the impact of large delays and Doppler shifts in two scenarios of interest for
future 5G systems, one for enhanced Mobile BroadBand (eMBB) services and one for NarrowBand-IoT (NB-IoT), for which
significantly different system architectures are considered.
The remainder of this paper is organised as follows. In Section 2, we outline the overall system architecture for both the
enhanced Mobile BroadBand and NarrowBand-IoT scenarios and introduce the main satellite channel impairments that are
considered in the following analyses. In Section 5.1, the waveform and main PHY/MAC procedures for NR are discussed
and the impact of the previously introduced channel impairments is discussed. In Section 5.2, the main characteristics
of NB-IoT communications are outlined with respect to the considered channel impairments and preliminary numerical
results are provided. Finally, Section 6 concludes this work.
.
2 S YSTEM A RCHITECTURE
Non-Terrestrial Networks and, thus, SatCom systems can bring significant benefits to future 5G services thanks to both
their wide area service coverage and the significantly reduced vulnerability to physical attacks or natural disasters. In
terms of system deployment, both stand-alone 5G SatCom and integrated satellite-terrestrial solutions can be envisaged.
This aspect is reflected in the architecture options currently being discussed within 3GPP for NTN, which serve as basis for
the analysis performed in the following. In particular, these options can be categorised based on either the type of satellite
payload, i.e., transparent or regenerative, and the type of user access link, i.e., direct or through an on-ground Relay Node
(RN), as shown in Figures 1 – 2. It shall be noted that, depending on the satellite altitude, there could be one or more
satellites providing on-ground 5G services.
With respect to the direct access scenarios (A1-A2) in Figure 1, the user access link directly involves the satellite(s) and
the on-ground mobile User Equipments (UEs) by means of the New Radio (NR) air interface. This air interface, which is
described in the next sections, is currently specifically designed for terrestrial systems and, thus, it is of outmost importance
to assess the impact of typical satellite channel impairments, e.g., large delays and Doppler shifts (see Section 4), on both
the Physical layer (PHY), e.g., subcarrier spacing in the NR waveform, and PHY/MAC procedures, e.g., Random Access or
Timing Advance. As for the feeder link, the air interface to be implemented depends on the type of satellite payload. On the
one hand, in case a transparent satellite is implemented as in Architecture A1, the system gNB(s) is conceptually located

(a) A1.
(b) A2.
Fig. 1. Architecture options with direct user access link.
(a) A3.
(b) A4.
Fig. 2. Architecture options with Relay Nodes providing the user access link.
.
at the Gateway (GW) providing the connection towards the Next Generation Core network (NGC) and the public data
network. In this architecture, the air interface between the satellite(s) and the GW is again provided by the terrestrial NR,
for which the impact of the different satellite channel impairments has to be assessed. On the other hand, when we assume
a regenerative payload as in Architecture A2, the gNB is implemented on the satellite, while the GW simply provides the
connection towards the NGC and public data network. This architecture is clearly more complex and has a higher cost,
but it also allows to significantly reduce the propagation delays and, thus, to ease the modifications (if any) that might be
needed to the NR PHY and MAC procedures, which can be directly terminated on the on-board gNB instead of requiring
to go down to the GW. The link between the gNB and the NGC can use any suitable air interface, e.g., the SoA DVB-S2X
air interface, [17], or an adapted version of the New Radio air interface between gNB and NGC, i.e., NG-C or NG-U. In
the following this general air interface is referred to as Sat-NG-C/Sat-NG-U, for the control and user plane information,
respectively. It is also worthwhile noting that NR systems foresee the implementation of the functional split concept in
the gNB. In particular, the gNB lower layers (namely, up to layer 3) can be implemented in a distributed unit (gNB-DU),
which in our case would be located on the satellite, while the remaining layers can be implemented in a centralised unit
(gNB-CU), which would be conceptually located at the system GW as for Architecture A1. The air interface between the
centralised and distributed units of a gNB is the X1 air interface and the current 3GPP specifications highlight that it is an
open air interface, as long as specific signalling operations are guaranteed. Thus, the air interface between a gNB-DU on
the satellite and its corresponding gNB-CU at the GW might be implemented by means of existing SatCom standards, as,
for instance, DVB-RCS(2), [18], or DVB-S2X, [17].
When considering architectures A3 and A4, the user access link is provided by on-ground Relay Nodes, to which the
backhaul connection is guaranteed by the satellite(s), as shown in Figure 2. NR Relay Nodes, and the related air interfaces,
are still under definition within 3GPP. However, we can fairly assume that they will have a similar behaviour to that of
LTE RNs. Based on this assumption, the following architectural and operational aspects shall be highlighted: i) the RN is
connected to a Donor gNB (DgNB), which provides the connection towards the NGC; ii) the RN can terminate procedures
and air interfaces up to Layer 3; iii) the air interface on the user access link (RN-UE) is a normal NR air interface; and
iv) the air interface on the backhaul link (RN-DgNB) is a modified version of the NR air interface, for which, however,4
the only differences are in some Radio Frequency characteristics and minimum performance requirements. Based on these
assumptions, the RN basically acts as a traditional UE from the DgNB point of view, while it is seen as a traditional gNB
from the UEs within its coverage. In addition to this, we can also state that the air interface on both the user access (RN-
UEs) and backhaul (RN-DgNB) links is the NR air interface described in [19]. This architecture is clearly more complex with
respect to the direct access scenarios due to the introduction of a certain number N of RNs, which shall be managed by M
DgNBs with N ≥ M , which also increases the overall system cost. However, since the RNs are equivalent to gNBs from
the users’ perspective, the user access link is now a traditional terrestrial link for which no modifications are needed. The
impact of typical satellite channel impairments thus has to be assessed on the backhaul link only, since it is implemented
by means of the NR air interface as previously highlighted. With respect to the feeder link between the satellite(s) and
the system GW, as for the direct access scenarios, we can have either a NR or a NG-C/NG-U air interface, depending on
whether the satellite payload is transparent or regenerative, respectively, and the same observations, e.g., functional split,
as provided for options A1-A2 apply.
In the following, we consider architectures A1 and A3, i.e., direct access or access through RNs with transparent payload
satellites, in two scenarios for enhanced Mobile Broadband (eMBB) and NarrowBand-Internet of Things (NB-IoT) services,
respectively, and discuss the main technical challenges that have to be coped with for the NR air interface due to typical
satellite channel impairments. For both scenarios, we assume a Frequency Division Duplexing (FDD) framing structure.
3
3.1
S CENARIOS
enhanced Mobile BroadBand (eMBB)
In this scenario, the system aims at providing broadband connectivity to mobile users by means of architecture option A3,
i.e., a transparent payload satellite providing backhaul connectivity to on-ground RNs that realise on-ground NR cells. In
particular, based on the previous discussion, the following assumptions hold for this scenario if not otherwise specified: i)
the air interface on the user access (RN-UE) and backhaul (RN-gNB) links is NR; ii) the RN operates as a normal gNB from
the UEs’ perspective and, thus, no modifications are needed on the user access link; and iii) the RNs are in fixed positions.
With respect to the satellite(s) deployment, we assume a Geostationary Earth Orbit (GEO) with altitude h sat = 35786 km,
system operating in Ka- or S-band. In particular, for Ka-band systems we assume an operating frequency in the range
19.7 − 21.2 GHz for the downlink and 27.5 − 30.0 GHz for the uplink, while in S-band we assume to be working at
2170 − 2200 MHz in the downlink and 1980 − 2010 MHz in the uplink. It shall be noted that these frequency ranges
are proposed in [5] as deployment options for the evaluation of NR-based SatCom systems. The deployment in other
frequency bands is clearly possible as long as the national, regional, and/or international spectrum requirements from the
radio regulations are met.
3.2
NarrowBand-IoT (NB-IoT)
In the second scenario, we focus on massive Machine Type Communications (mMTC) and, in particular, on NB-IoT. To
this aim, we assume a direct access architecture with transparent satellite payload, i.e., architecture option A1. Since IoT
applications are extremely sensitive to propagation delays and the IoT terminals have stringent battery life requirements, a
GEO satellite system is not a feasible option due to the extremely large delays and path loss values. Thus, in the following,
we focus on non-GEO systems and, in particular, on a mega-constellation of Low Earth Orbit (LEO) satellites that have
an altitude between h sat = 600 and h sat = 1500 km. With respect to the operational frequency, we consider the S-band
deployment, i.e., 2170 − 2200 MHz downlink and 1980 − 2010 MHz uplink. Differently from the eMBB case, in this scenario
there is no RN providing the user access link and, thus, the impact of the satellite channel impairments described in the
next section can be extremely deep on the traditionally terrestrial NR air interface.
4
S ATELLITE CHANNEL IMPAIRMENTS
In order to assess the feasibility of NR techniques and procedures in the eMBB and NB-IoT scenarios previously outlined,
in this section we discuss the typical satellite channel impairments that might have an impact on the NR PHY and MAC
layers, as large Doppler shifts and propagation delays.
4.1
Delay
With respect to the propagation delay, we have to consider both the one-way propagation delay and the Round Trip Time
(RTT), depending on the type of procedure we are considering, i.e., whether the whole procedure or a specific step can be
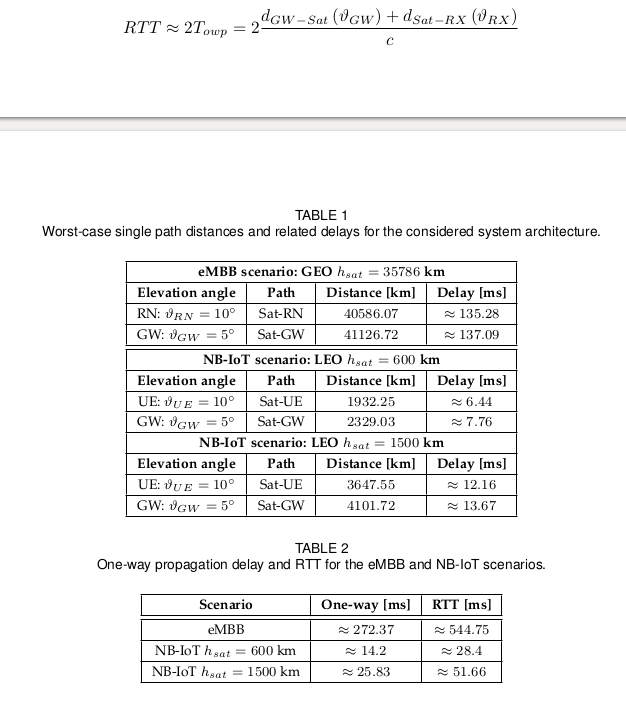
terminated at the gNB or it requires an interaction with the NGC. In the following, the RTT is approximated by twice the
propagation delay between the transmitter and the receiver, since the signal processing time in a Satellite Communication
context can be assumed negligible with respect to the propagation delay. In order to estimate the propagation delay in the
considered scenarios, we further assume to be in a pessimistic scenario in which the transmitter and the receiver are not
perfectly aligned and, thus, they have different elevation angles. The overall RTT can thus be computed as follows:
.
.
where T owp is the one-way propagation delay, d GW −Sat the distance between the GW and the satellite as a function of
its elevation angle θ GW , d Sat−RX the distance between the satellite and the receiver (i.e., the RN or the UE for the eMBB
or NB-IoT scenario, respectively) as a function of its elevation angle θ RX , and c the speed of light. In the following, the
system GW is assumed to be at θ GW = 5 ◦ elevation angle, while the minimum elevation angle for both the UEs and RNs
is assumed to be θ RX = 10 ◦ . The single paths distances and the related delays between the satellite and both the UE/RN
and the GW are listed in Table 1, where we considered both the minimum and maximum satellite altitude in the NB-IoT
scenario. Based on these values, the one-way propagation delay, i.e., RN (UE) to gNB (DgNB), and RTT, i.e., RN (UE) to
gNB (DgNB) and back to the RN (UE), shown in Table 2 can be obtained. It can be noticed that, as expected, for the eMBB
scenario the propagation delay might be an issue for all procedures and steps, since it is several orders of magnitude above
typical terrestrial networks delays. With respect to the NB-IoT scenario, the impact of the delays shall be evaluated on
a case-by-case basis also taking into account the type of communication that the considered procedure is requesting, i.e.,
towards the gNB or the NGC.
4.2
Doppler shift
The Doppler shift consists in the change in the carrier frequency due to the relative motion between the satellite and the
user terminal. The maximum target user mobility in NR requirements is set to 500 km/h for frequencies below 6 GHz and
it is defined as the maximum NR speed with respect to the serving gNB at which the NR can be served with a specific
guaranteed Quality of Service (QoS). Assuming a carrier frequency f c = 4 GHz, and by reminding that the Doppler shift
can be computed as f d = (v · f c )/c , where v is the relative speed between the transmitter and the receiver, it is possible to
obtain a maximum Doppler shift f d = 1.9 kHz. If we focus on the considered SatCom scenarios in Ka-band, assuming a
carrier frequency f c = 20 GHz the maximum Doppler shift for a 500 km/h relative user mobility becomes approximately
9.3 kHz, which is clearly significantly above the maximum values assumed for terrestrial NR systems.
When considering satellite communications, the Doppler shift can be caused by the satellite movement on its orbit and
the user terminals’ mobility on ground. It shall be noticed that, in the considered eMBB scenario, we are considering GEO
systems serving fixed on-ground Relay Nodes and, thus, the Doppler shift can be assumed to be negligible. On the other
hand, when we consider the NB-IoT scenario, we have non-GEO satellites serving moving user terminals and, thus, the
Doppler shift can introduce significant frequency shifts with respect to those expected in terrestrial NR systems. This could
deeply impact the frequency synchronisation of the resources used to transmit through the NR air interface, as discussed
in the following sections. In order to assess the impact of Doppler shifts on the NR specifications, we refer to [13], where
the authors provided a closed-form expression for the Doppler shift as a function of the satellite orbital velocity (relative
to the user terminal) and the elevation angle:
.
 .
.
5
5.1 TECHNICAL C HALLENGES A NALYSIS
eMBB scenario
In this section, the physical layer for NR systems is described and the impact of the previously outlined satellite channel
impairments is assessed for the eMBB scenario.
5.1.1 PHY
In general, the NR waveform is OFDM-based for eMBB scenarios. The baseline waveform is CP-OFDM, which is similar
to LTE, is designed to have improved spectral utilization by means of an extended numerology flexibility and adaptability,
among the others, [19]. The DFT-s-OFDM based waveform is also supported in the uplink, complementary to CP-OFDM
waveform at least for eMBB for up to 40 GHz bandwidths. In general, the specifications state that CP-OFDM waveforms
can be used for a single-stream and multi-stream (i.e., MIMO) transmissions, while DFT-s-OFDM waveform is limited to
a single stream transmissions targeting link budget-limited cases. In terms of framing and numerology, NR allows for
a significantly improved flexibility with respect to legacy LTE systems. In particular, the frame structure is designed to
provide flexibility in the choice of subcarrier spacing, FFT size, subframe duration, and CP length. The subframe duration
for a reference numerology with subcarrier spacing (15·2 n ) kHz is exactly (1/2 n ) ms, with n = 0, 1, . . . , 5 , i.e., from 15 kHz
to up to 480 kHz subcarrier spacings. The working assumption is that symbol-level alignment across different subcarrier
spacings with the same CP overhead is assumed within a subframe duration in a NR carrier. The Physical Resource Block
(PRB) is defined as 12 subcarriers.
With respect to the modulation schemes, QPSK, 16QAM, 64QAM, and 256QAM (with the same constellation mappings
as in LTE) are supported for both the downlink and the uplink. π 2 -BPSK in also supported in the uplink for DFT-s-OFDM
waveforms. The channel coding scheme is different depending on the type of information to be transmitted, i.e., whether it
is Control Plane (CP) or User Plane (UP). For the UP in eMBB scenarios, flexible LDPC codes are implemented as a single
channel coding scheme for medium to long block sizes, while in the CP, in which short codewords have to be transmitted,
the standardised channel coding scheme is Polar Coding (except for very small block lengths where repetition/block
coding may be preferred). One of the critical aspect in this framework is related to the employed modulation and coding
formats. First of all, due to the low Signal-to-Noise Ratio (SNR) levels in SatCom, it might be necessary to extend the
modulation and coding schemes to meet the reliability requirements of terrestrial NR systems. In addition to this, in typical
terrestrial cellular systems, the gNB selects the most appropriate modulation and coding scheme based on the channel
quality indicator reported by the UE. Due to the large delay of satellite systems, channel information provided by the
UE could be not updated, leading to a suboptimal use of the channel with consequently lower spectral efficiency. In this
framework, it is thus necessary to: i) improve the channel information; and. ii) optimise the adaptive modulation and
coding techniques for the UE, the RN, and the gNB packets transmissions. As a possible solution, the RN could have
an active role, optimising both the user access and the backhaul air interfaces, which would require a new approach to
exchange channel information between these nodes.
5.1.2 Candidate Waveforms and Performance Evaluation
Candidate waveforms that have been studied for NR, apart from the selected CP-OFDM and DFT-s-OFDM schemes,
include Filtered OFDM (f-OFDM), Windowed OFDM (W-OFDM), Filter Bank Multicarrier (FBMC), Universal Filtered
Multicarrier (UFMC), and Generalised Frequency Division Multiplexing (GFDM). An analysis in [20] for the terrestrial
scenario shows that, while these waveforms achieve lower Out-Of-Band-Emissions (OOBE), they mostly suffer from higher
PAPR and higher computational complexity. However, they provide other advantages such as higher time-frequency
efficiency, support for short-burst traffic, fragmented spectrum, and greater tolerance to timing and frequency offsets. The
work done in [21] shows that f-OFDM is a flexible waveform that appears to be the most promising candidate waveform
for NR cellular networks.
As discussed before, the OFDM-based NR waveform allows for scalable subcarrier spacing, filtering, subframe duration,
CP length and windowing. Given that the mobility of the satellite with regards to the RN is not a major issue for a GEO-
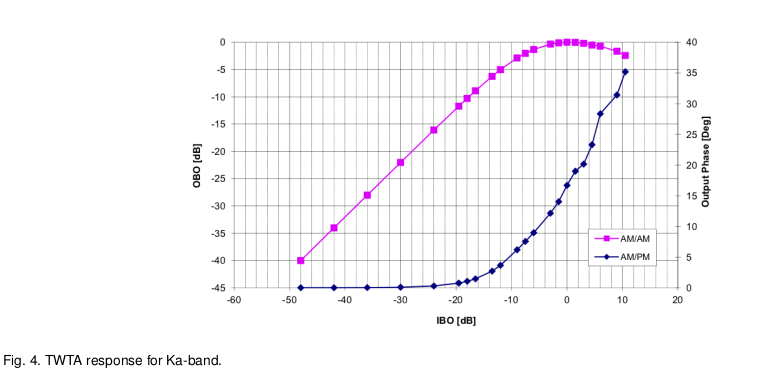
based deployment scenario, we focus on optimising the satellite waveform design with respect to TWTA nonlinearities.
Figures 3a-3d illustrate a preliminary analysis of the performance of F-OFDM in comparison to the legacy OFDM in a
satellite nonlinear channel. We use a basic OFDM design for this analysis, having an FFT size N = 1024 with 600 used
subcarriers (loaded with 64QAM data symbols) and a CP length 72 , in an AWGN channel. A filter with a rectangular
frequency response (i.e., a sinc impulse response) is used with a filter length L = 513 on the OFDM signal to produce the
F-OFDM signal. The low-pass filter is realized using a window which effectively truncates the impulse response and offers
smooth transitions to zero on both ends. The satellite nonlinear channel is modelled based on the conventional TWTA
response for Ka-band specified in [22] and shown in Figure 4. Figure 1 shows the significant improvement in OOBE that
is achievable by using F-OFDM in a linear channel,
wherein the OOBE suppression is about 150 dB in contrast to the 30
dB achieved by OFDM as shown in Figure 3b. However, this improvement is degraded in a satellite nonlinear channel
.

.
even for an input back-off, IBO = 20 dB, with F-OFDM degrading back to the legacy OFDM performance as shown in
Figures 3c-3d. This emphasizes the high sensitivity of F-OFDM to non-linear distortion. This is because of the high level
filtering applied, which also results in higher PAPR. Future work will incorporate nonlinear compensation techniques in
studying how to improve and optimise the performance of F-OFDM over the satellite nonlinear channel.
5.1.3 PHY/MAC Procedures
In this section, we review the most critical PHY and MAC layer procedures of NR systems for the eMBB scenario. In
particular, the impact of the large delays and Doppler shifts previously introduced on these procedures is assessed and
potential solutions are proposed. To this aim, as already mentioned in the previous sections, it shall be noted that in
the eMBB scenario we are focusing the backhaul link between the RN and the DgNB, which are fixed and communicate
through a GEO satellite. As a consequence, the Doppler shift does not introduce any issue, while the very large propagation
delays might have a strong impact.
Timing Advance
The Timing Advance (TA) is a time offset used in the timing adjustment procedure that is performed by the UEs with
support form the gNB, [19], [23]. In particular, the TA is a negative offset that informs the UE on the correct uplink
transmission timing so as to guarantee that all of the uplink frames received by the gNB from its users are aligned with
the corresponding downlink frames. Since the time-frequency resource blocks are assigned to the UEs on a 0.5 ms slot, this
procedure ensures that resources assigned for user data in a time slot are not going to interfere with control or estimation
signals that can be in the same time-frequency locations in the following time slots. The TA value, T T A , is estimated by
the gNB during the Random Access procedure when the NR UE is trying to establish an RRC connection, and then the
value is provided to the UE within the response to the access request. After the initial timing adjustment during the RRC8
.
.
connection establishment, all the following adjustments are provided by the gNB as a difference with respect to the current
TA value. The UE shall adjust the timing of its uplink transmission at sub-frame n + 6 for a timing advancement command
received in sub-frame n and, in addition, the UE also has a reconfigurable timer, the timeAlignmentTimer, which is used to
control for how long the UE is considered time aligned in the uplink and can be set up to 10.24 s, [24], [25].
From NR specifications, the TA value is obtained as T T A = T C (N T A + N T A,of f set ) , where N T A,of f set is a parameter
depending on the considered frequency band and N T A = T A ·16·64·/2 μ , where T A = 0, 1, . . . , 1282 is the Timing Advance
Command provided by the gNB in the response to the Random Access request, T C = 1/ (∆f max N f ) with N f = 4096 and
∆f max = 480 kHz is the basic NR time unit, and μ denotes the subcarrier spacing as 2 μ · 15 kHz. When an FDD framing
(single)
structure is considered, N T A,of f set = 0 and we can write the overall TA adjustment as T T A = N T A T C = T A T T A
,
(single)
is the TA basic unit, i.e., the timing advance value for T A = 1 . This value depends on the subcarrier spacing
where T T A
(single)
and, in particular: i) for μ = 0 we have the same subcarrier spacing as in LTE, which leads to T T A
= 0.52 ns and to
−2
a maximum TA value T T A = 0.6667 ms; and ii) for μ = 5 , T T A = 0.16 · 10 ns and, thus, the maximum TA value is
T T A = 0.0209 ms. These timing adjustment values correspond to a step in the estimation of the distance between the UE
and the gNB equal to c · T T A /2 , where the division by 2 is to account for the RTT, which leads to 78.125 meters for μ = 0
and 2.441 meters for μ = 5 .
Based on the above description, there are two aspects to be assessed in the SatCom context: i) the maximum allowed
TA shall be such that the maximum differential delay between the considered UEs is below its value. In fact, in case this
condition is not satisfied, there will be some UEs that will receive a TA command below the value that would actually
guarantee the uplink and downlink frame synchronisation at the gNB, which would lead to disruptive interference; and
ii) the reconfigurable timer that informs on the validity of the current TA value shall be above the maximum RTT, so
as to guarantee that the UEs are considering a valid TA adjustment. With respect to the former timer, it shall be noted
that we are considering the eMBB scenario, in which we have a fixed GEO satellite and several fixed RNs on-ground. In
general, the maximum allowed TA value should be such that the maximum distance between any couple of RNs does not
introduce a differential time delay above it. As previously computed, the maximum allowed TA in the worst-case scenario,
i.e., maximum subcarrier spacing, is T T A = 0.0209 ms, which leads to a maximum distance of 3.135 km, while in the best
case T T A = 0.6667 ms leads to 100 km. Both these distances can be significantly below the distance between a couple of
RN, since we are addressing a GEO system with a single satellite covering a very large portion of the Earth. However, as
already highlighted, we are in a fixed scenario both from the transmitter (gNB at the GW) and the receiver (RNs) point
of view and, thus, the TA value can be easily set to the specific delay value between each RN and the system GW when
the RN is deployed in the coverage area, i.e., through an ad hoc system deployment. The TA adjustment can then still be
implemented only to take into account the differential adjustments that might be required in order to compensate for the
orbit adjustment of the GEO satellites, which in any case will be below the maximum distance of . As for the reconfigurable
parameter that informs the RNs on the validity, in the time domain, of the current TA value, also based on the ad hoc
system deployment that can be realised, the only aspect to be considered is that this value ensures that the TA adjustment
related to the satellite orbit compensation is valid for a sufficient period. Since the maximum value of timeAlignmentTimer
is equal to 10.24 s, which is significantly below the one-way and RTT delays outlined in the previous section, we can
conclude that there is no specific issue for the NR TA in the considered eMBB scenario.
Random Access
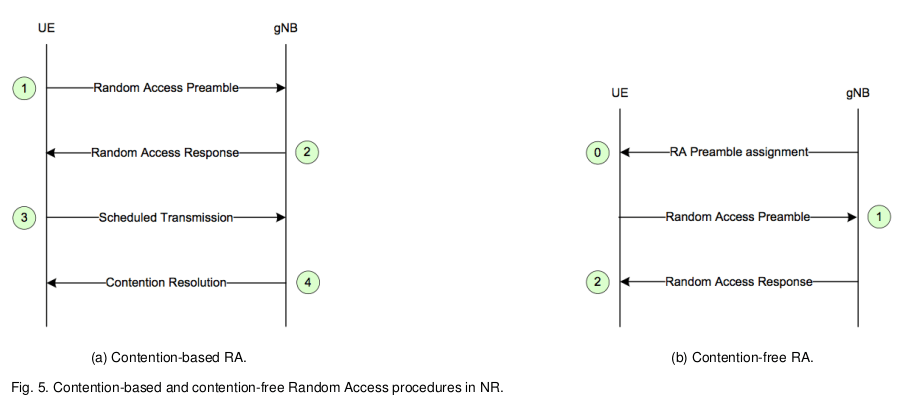
The Random Access (RA) procedure between a RN and its DgNB is the same as that between a NR UE and the gNB and,
in particular, it is the same to that implemented in LTE, from an algorithmic point of view, [24]. The RA procedure can
be: i) contention-based, when the UE is not yet synchronised or lost its synchronisation; or ii) contention-free, in case the9
.
 .
.
UE was previously synchronised to another gNB. Both procedures rely on the transmission of a random access preamble
from the UE to the gNB, which shall be performed on specific time-frequency resources that are indicated by the gNB on
the control channels. The two procedures are shown in Figure 5. Focusing on the contention-based procedure, since the
contention-free is included in it involving only the first two steps, the following operations are performed:i) in step 1, the
NR UE randomly choses a preamble from a predefined set, also based on preliminary information on the expected amount
of resources to be used in the subsequent (if any) step 3, and sends it to the gNB along with a temporary network identifier,
which is computed based on the RA preamble as well; ii) in step 2, the gNB responds to the request with a RA Response
(RAR) message, which shall be received by the UE within a RA time window between starting after the transmission of
the last preamble symbol. The value of this time window is still under discussion within 3GPP standardisation, but we
can fairly assume that it will be similar to the LTE time window, which can be set up to 15 ms. If this counter expires, the
UE can attempt a new RA procedure, up to 200 tentatives; and iii) in steps 3 and 4 the NR UE is assigned a final network
identifier, subject to the successful resolution of any possible contention. In particular, HARQ is implemented in step 3,
with a contention timer up to 64 subframes, i.e., 64 ms, and up to 16 tentatives, [19], [23]–[25]. If the UE receives a correct
response in Step 4, the procedure is successful and it is now logged to the NR network. It is worthwhile highlighting that
the contention-free procedure involves Step 1 and 2 only.
In the considered eMBB scenario, and focusing on the contention-free RA, the UEs in each on-ground cell perform the
RA procedure only involving the corresponding RN, which terminates all protocols up to Layer 3, and thus this does not
require any modification since the satellite channel does not come into play. As for the contention-based RA, in step 3
and 4 the RN shall contact the NGC, through the DeNB, so as to obtain a final network identifier for the NR UE. In this
moment, the delay on the satellite channel is involved and shall be carefully taken into account. However, as previously
reported, the contention timer in this phase of the RA procedure is set to up to 15 ms, which is significantly lower than
the RTT between the RN and the NGC for the eMBB scenario. Thus, from the NR UE perspective, the RA procedure might
require the extension of the contention resolution timer so as to cope with the RTT for GEO systems. In addition to this, the
RA procedure shall also be performed at the beginning of the RN start-up procedure, since, as highlighted in the previous
sections, the RN is initially seen by the DgNB as a normal NR UE. In this case, both the RAR window and the contention
resolution timer shall be compared with the satellite channel RTT, which is significantly larger than the maximum values
foreseen in the NR specifications. Thus, as for the contention resolution timer for the UE RA procedure, in the RN start-up
procedure we might need to extend both the contention resolution timer and the RAR time window. However, similarly
to the Timing advance procedure, it shall be noted that the RN start-up is only required when the RN is switched-on and
connected to its DgNB at the system GW. Thus, the RN start-up procedure can be easily avoided by means of an ad hoc RN
initialisation and, since both the RN and the GEO satellite are fixed, no further actions will be required in this context.
HARQ
The NR air interface supports a one-bit per Transport Block (TB), i.e., MAC layer information block, for HARQ-ACK
reporting. Both for the uplink and the downlink, multiple parallel Stop-And-Wait (SAW) HARQ processes can be run
within each MAC entity in both the gNB and the NR UR, [23]–[25]. The maximum number of processes is 16 for the
downlink HARQ and either 8 or 16 for the uplink HARQ, but is shall be noted that these values still have to be confirmed
within 3GPP. Each process is asynchronous, i.e., retransmissions can happen at any time relative to the first attempt,
thus requiring an HARQ identifier, and adaptive, i.e., transmission attributes are adaptively reconfigured to the channel10
conditions, which is then exploited by either Incremental Redundancy (IR) or Chase Combining (CC) TB combination
approaches. In this context, the critical aspect to be highlighted is that the HARQ procedure is asynchronous in terms of
the time slot in which a UE or the gNB can send again a specific TB, which required the association to a specific HARQ
identifier, but the time slots in which a UE (gNB) is allowed to send its ACK is tightly specified in the standard. In particular,
a UE (RN) receiving a TB with the last symbol in subframe n − k shall send the ACK/NACK information in subframe
n , where k is an offset in number of subframes indicated from higher layers in the control information and it takes into
account the propagation delay between the UE and RN. If this parameter is not specified by the upper layers, by default
a UE (RN) that receives the last TB symbol in subframe n − k shall provide the related ACK/NACK in time subframe
n − k + 4 . The allowed values for the parameter k are still under discussion and, thus, for the following analysis we focus
on the default solution in which the delay between the reception of a TB and the transmission of the related ACK/NACK
is 4 subframe. It shall be noted that this solution corresponds to the legacy LTE HARQ processing time, which takes into
account 3 ms of processing delay for the TB (ACK/NACK) and a 1 ms propagation delay (for the maximum cell size of
100 km) for an overall 4 ms.
The most critical aspect to be considered when implementing NR HARQ procedures over a satellite channel is that
the minimum number of parallel processes is actually obtained as a function of the overall HARQ processing time as
(min)
N HARQ = T HARQ /T T I , where T HARQ is the HARQ processing time and T T I ms is the transmission time interval for
one TB. In the NR air interface it is highlighted that the HARQ processing time at least includes the delay between the
downlink data reception timing to the corresponding ACK/NACK transmission timing and the delay between the uplink
grant reception timing to the corresponding uplink data transmission timing. Thus, T HARQ includes the time for the UE
(RN) to send the ACK/NACK for the TB received in time subframe n − k , i.e., 4 subframes, and the time for the RN
(UE) to send again the data if a NACK was received, i.e., again 4 subframes, which leads to T HARQ = 8 subframes, i.e., 8
ms in FDD framing. Differently from legacy LTE systems, the TTI for NR systems depends on the subcarrier spacing. In
particular, when a 15 kHz subcarrier is considered, the TTI is equal to 1 ms as in LTE, while for a subcarrier spacing of
2 μ · 15 kHz, with μ = 1, 2, . . . , 5 , the TTI is 1/2 μ ms. Thus, the maximum number of parallel processes might go to up to
128 with a 480 kHz subcarrier. However, this is still under discussion with 3GPP RAN meetings and, in particular, for the
moment being the maximum number of parallel processes has been set to 16 , i.e., an acceptable value is considered the one
obtained with 30 kHz carriers and 0.5 ms TTI values.
In the considered eMBB scenario, we have a significantly larger propagation delay with respect to the terrestrial case. In
particular, for the computation of the maximum number of HARQ processes, while we can still assume a 3 ms processing
delay for the TB (ACK/NACK), the propagation delay is the one provided in Table 2. Thus, the maximum number of
parallel HARQ processes in the considered system is N HARQ ≈ 2 × 277.37/T T I that, with T T I = 1 ms, leads to
555 processes. This has a two-fold impact on the system: i) the soft-buffer size of the UE, which is given by N buf f ∝
N HARQ T T I ; ii) the bit-width of DCI fields would have to be increased to at least 10 bits so as to guarantee the possibility
to identify N HARQ processes. On one hand, increasing the UE buffer size can be very costly, while on the other hand larger
bit-widths of DCI field would lead to large DL control overhead. To cope with the above issues, different solutions can be
proposed: i) increasing the buffer size to cope with the large number of HARQ processes; ii) increase the number of HARQ
processes, by maintaining the buffer size under control, by using a 2 bit ACK, [27], to inform the transmitter on how close
the received packet is to the originally transmitted one. Therefore, the number of retransmission will be reduced, because
the transmitter can add the redundant bits according to the feedback information; iii) reducing the number of HARQ
processes and the buffer size, which also reduces the system throughput; and iv) not implementing the HARQ protocol,
which requires solutions to solve issues related to colliding/non-decodable packets. These solutions all have an impact on
either the overall system cost or its throughput and, therefore, shall be carefully assessed.
5.2
NarrowBand-IoT
LTE releases have provided progressively improved support for Low Power Wide Area Network (LPWAN). In fact, Release
13 EC-GSM-IoT [36] and LTE-eMTC [36] aim to enhance existing GSM and LTE networks, for better serving IoT use cases.
A third technology, the so called Narrowband IoT (NB-IoT) [37], shares this objective as well. While it is designed to achieve
excellent coexistence with legacy GSM and LTE technologies, NB-IoT is actually a new technology and, as a consequence,
not fully backward compatible with existing 3GPP devices [42]. According to 3GPP, NB-IoT aims at offering [38]:
.
Ultra-low complexity devices to support IoT applications.
Improved indoor coverage of 20 dB compared to legacy GPRS, corresponding to a Maximum Coupling Loss (MCL)
of 164 dB while supporting a data rate of at least 160 bps for both uplink and downlink.
Support of massive number of low-throughput devices (at least 52547 devices within a cell-site sector).
Improved power efficiency (battery life of 10 years) with battery capacity of 5 Wh and transmission power
depending on the terminal power class (e.g., 20 dBm for Power Class 5 and 23 dBm for Power Class 3).
Exception report latency of 10 s or less for 99% of the devices.
.
Possible applications varies from smart metering, smart cities and buildings, environmental and agriculture monitoring,
up to animal/people tracking.
In the following subsections, at first we are going to highlight a list of the most important challenges for this technology
to be used in the considered architecture/scenario (Sec. 5.2.1), then, some useful information related to the NB-IoT physical
.
layer waveforms and, in particular, an assessment on the effect of differential Doppler and frequency offset on NB-IoT
transmission are described, and finally an investigation on the timing constraints and on the procedures of NB-IoT are
addressed.
5.2.1 Main challenges in the use of NB-IoT over LEO satellites
The aim of the current section is to highlight the principal challenges to be faced concerning the integration of NB-IoT over
satellite links. In particular, the focus is on LEO satellites due to latency and link budget constraints required by NB-IoT.
While the following item list is not completely exhaustive of all the possible issues to be tacked in the whole study, it
includes the most important parameters:
1)
Latency: even if the latency constraints in NB-IoT are relaxed [38], some timers coming from LTE architecture
have to be taken into account into the investigation. In particular the study on the 3GPP standards highlighted
the presence of timers in the Random Access procedure, shown in Figure 5 and RRC procedures that might be
incompatible with SatCom channel Round Trip Time (RTT) delays, which are:
.
RRC Timers procedure
RAR time window size
Contention Resolution window size
Timing Advance (TA)
HARQ process
Doppler Effect and Phase Shift: due to the NB-IoT frame structure, with really narrow and close subcarriers, the
Doppler and phase impairments characteristics of a satellite communication channel, in particular when LEO or
MEO satellites are considered, could prevent a successful transmission. In particular, the differential Doppler and
Carrier Frequency Offset (CFO) amongst users is a potential source of degradation for Scenario A.
Battery Life: NB-IoT requirements suggest a battery life around 10 years. The longer RTT, characteristic for satellite
communications, will imply longer wake up period for devices in order to perform access procedures and data
transmission. Furthermore higher power could be needed in order to close the link. These issues could prevent the
long duration of batteries.
Link Budget: power constraints of Satellite, eNodeB (eNB) and NarrowBand User Equipment (nUE or UE) must
be considered for the feasibility of GEO and LEO feeder and user links, on both forward and return paths.
While the link budget is an important aspect to be taken into account in order to guarantee a reliable transmission, the
following analysis assumes the system to be modelled so that the link can be closed. This is justified, for example, by the
use of proper satellite antenna gains.
.
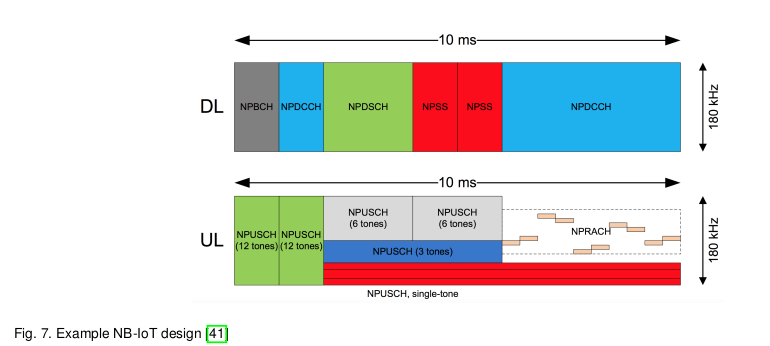
5.2.2 NB-IoT Physical Layer
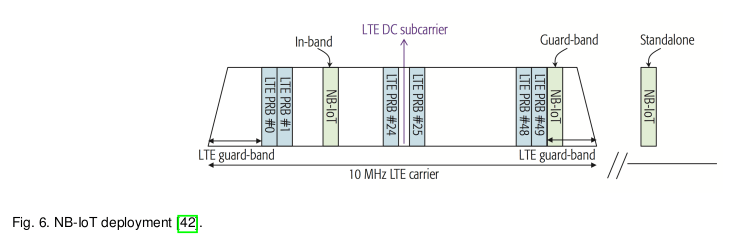
An operator can deploy NB-IoT inside an LTE carrier by allocating one of the Physical Resource Blocks (PRBs) of 180 kHz
to NB-IoT, or in GSM spectrum, reducing the deployment costs. Three different modes of operation have been defined [44]:
.
In-Band: NB-IoT is deployed inside an LTE carrier. The NB-IoT carrier consists of one resource block of 180 kHz . In
this case, LTE and NB-IoT share transmit power at the eNB.
Guard-Band: the NB-IoT channel is placed in a guard band of an LTE channel. The NB-IoT downlink can share the
same power amplifier as the LTE channel.
Stand-Alone: NB-IoT is deployed as a standalone with at least 180 kHz of the GSM spectrum. All the transmit power
at the base station can be used for NB-IoT, which thus significantly enhances the coverage.
.
Similar to existing LTE User Equipments (UEs), an NB-IoT UE is only required to search for a carrier on a 100 kHz raster,
referred as anchor carrier [42], intended for facilitating UE initial synchronization. An anchor carrier can only be placed
in certain PRBs. NB-IoT reuses the LTE design extensively, including the numerology, with the Orthogonal Frequency
Division Multiple Access (OFDMA) for the Downlink, Single Carrier Frequency Division Multiple Access (SC-FDMA) for
the Uplink, channel coding, rate matching, interleaving, and so on [29], [30], [34], [42].
.
Frequency error constraints for NB-IoT
Due to the NB-IoT PRB deployment (in in-band operation mode), the UE must be able to search the carrier of NB-PRB
with a CFO up to ±7.5 kHz , according to [38] and [42], during the synchronization procedures. Furthermore the minimum
subcarrier spacing of 3.75 kHz must be taken into account as constraint for Doppler.
Focussing on the considered scenario, the Doppler experienced by the i-th user of the same footprint (in the Downlink
channel) and, viceversa, on the satellite with respect to the i-th user of the same footprint (in the Uplink channel) can be
describer as f di = f d common + ∆f di , where f d common is the common part of Doppler experienced by every user in the same
footprint while ∆f di , the differential part, depends on the relative positions of users in the footprint.
Regarding the Downlink (DL) user link (which we define as Sat → nUE), the differential Doppler is not an issue
since each UE has to compensate it own experienced Doppler f di and CFO impairments. In fact, the whole bandwidth of
180 kHz will be received by each UE under the same Doppler condition, with negligible effects on the single subcarriers.
On the other hand, on the UpLink (UL) user link (which we define as nUE → Sat), due to the fact that each nUE
generates its own signal and SC-FDMA is used, ∆f di must be somehow compensated such that the frame structure seen
by the satellite does not contain overlapping information among subcarriers. Specifically ∆f di must be mitigated in case
its value is above the LTE Doppler constraints of 950 Hz ,which is derived using 3GPP specification about mobile UEs, a
carrier frequency of 2 GHz and a maximum relative speed at 500 km/h [35]. More details can be also found in [31].
Analysis on frequency errors for NB-IoT waveforms
The aim of this section is to describe and assess the impact of both differential Carrier Frequency Offset (CFO) and
differential Doppler among carriers coming from different UEs in the Uplink channel. The parameters used in the below
formulation are defined in Table 3.
The satellite system considered is LEO with transparent payload and variable zenith heights from 600 up to 1500 km.
A condition case of 90 o of elevation angle has been considered, which is the worst case for the problem of the differential
Doppler among UEs carriers. The satellite speed is constant and computed as:
.
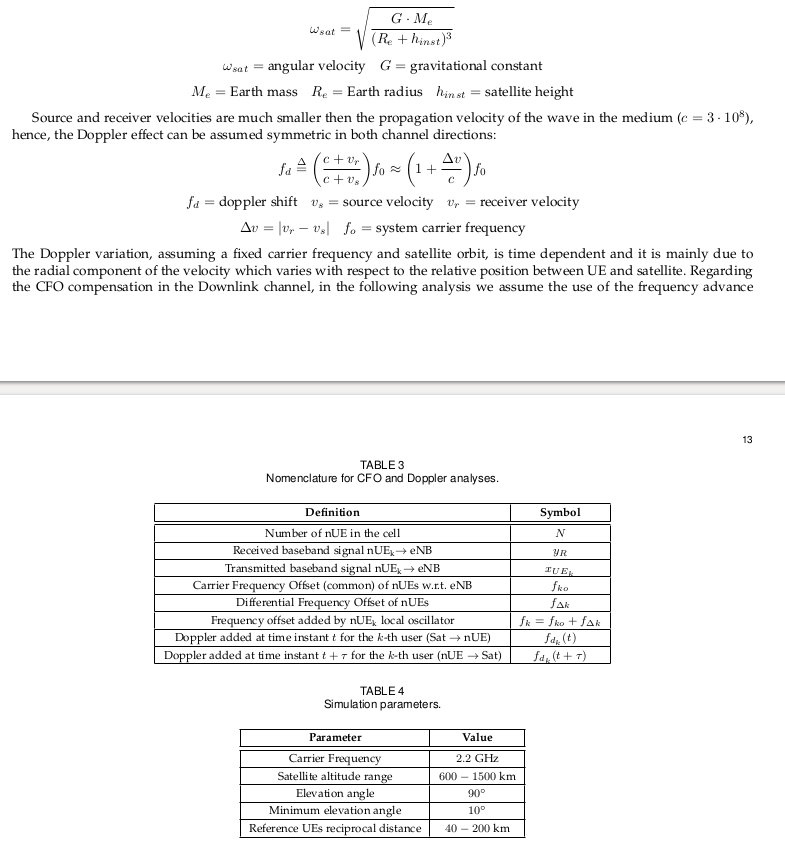
method in [39], [40]. The offset compensation should be intended with respect to the eNB reference frequency which is
acquired by the UE at the switch on procedure every time the UE resumes from the RRC IDLE state [31].
In the following, CFO and Doppler effects will be investigated separately in order to highlight the effect given by each
component. It is worth mentioning that the index k refers to the k-th user.
•
Carrier Frequency Offset:
The assumption is that Doppler effects are neglected in both eNB ↔ Sat and Sat ↔ nUE k links of the UpLink channel , while
only the Local Oscillator (LO) imperfection of the nUE k introduces an offset f k and both the eNB and satellite LO
(in case of frequency conversion) are perfectly centered in f 0 , which is the carrier frequency of the system.
Uplink (nUEs → eNB)
Each k-th nUE transmits it own signal affected by a frequency offset caused by the mismatch between its own carrier
frequency (non perfect LO) and the system carrier frequency (assuming perfect LO for eNB). Due to the differential
frequency offset amongst different nUEs, the received baseband signal at the eNB is given by the superposition of
each signal as follows:
.

While the multiple access of baseband signals associated to each UE is managed by means of SC-FDMA, the
differential frequency offset amongst nUEs, depending on the amount of differential offset, can be a source of
degradation for the system which must be compensated at the nUE through frequency advance due to the slotted
structure of SC-FDMA waveform. This procedure is based on the downlink broadcast signal.
•
Doppler
The aim of this paragraph is to repeat the analysis reported above, this time taking into account Doppler effect, in
particular by focussing on possible differences on the two cases.
The assumption is that the LOs of eNB and nUE k are perfectly centered in f 0 and no frequency offset due to LOs
are introduced. For the sake of simplicity, Doppler effect introduced by the eNB ↔ Sat link is neglected, so an ideal
link is assumed. This is justified by noticing that, for the the eNB ↔ Sat link, the Doppler is applied to the whole
composite signal and it does not introduce differential Doppler effects, hence it can be compensated even at the
eNB. As before, we define the parameters used:
Uplink only (nUEs → eNB)
Since each k-th nUEs is in a different position on the coverage area, it experience a different Doppler value at
the same time instant. This means that, differently from the CFO analysis, there is a correlation between the users
.
 .
.
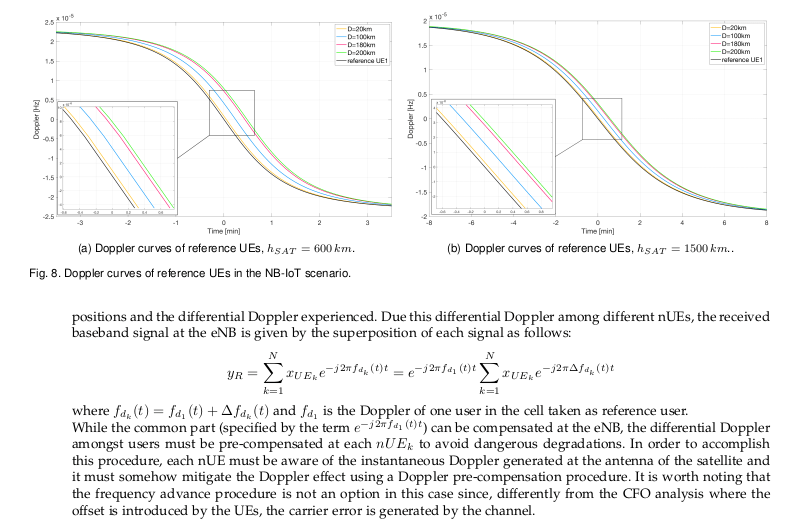
Differential Doppler assessment
In this paragraph, a preliminary assessment on the evaluation of the differential Doppler over LEO satellites is shown. The
assessment has been performed using an analytical characterization of the Doppler, which can be found in [13] and [43].
The purpose is to quantify the differential Doppler in worst case conditions and compare the obtained results with the
constraint given by NB-IoT. For the purpose of the analysis, the following parameters are used:
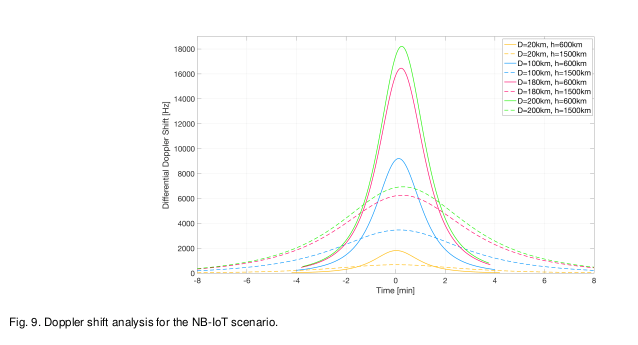
Figure 8 shows the Doppler behaviour over time for two UEs placed at different distances in the coverage area. The
difference between two curves of the same considered distance is the differential Doppler as seen by the satellite antenna
at each timing instant. The differential Doppler is highlighted in Figure 9, in which the changing parameter is the carrier
frequency and the satellite altitude.
As expected, the higher the orbit the lower the differential Doppler. The common Doppler can be compensated by
means of a GNSS receiver, according to [13]. On the other hand, it is worth recalling that the maximum differential
Doppler, according to LTE Doppler constraint, should be below 950 Hz.
While the purpose of this section is to highlight the problem assessment only, there are some solutions which can be
proposed and which will be part of future works. The aim of these solutions is to mitigate the level of frequency errors
down to a value tolerable by the UE device.
In fact, if the Doppler can be reduced down to the limit reported in the previous section using additional strategies,
like for example position tracking solutions used in [13], the use NB-IoT over LEO can be facilitated. While this solution is
compatible with the current devices, a GNSS device can drain part of the battery life of the UE. Another technique to be
taken into account for frequency/Doppler mitigation is the so called frequency advance [39], [40] which allows to estimate
the frequency offset in the forward link and then use this information in the reverse link for an effective frequency offset
reduction and a consequent improvement in frequency multiplexing in the uplink. However, frequency advance is not
designed for differential Doppler effects and some adaptations may be required.
.
5.2.3 PHY/MAC Procedures
Timing Advance
Timing Advance (TA) is a procedure that is used to control uplink signal transmission timing, in order to maintain a perfect
alignment among all the transmission from all the UE served by the same eNB. The TA in NB-IoT is performed from the
UE assisted by the eNB and follow the same steps as legacy LTE. Upon reception of a timing advance command, the
.
.
UE shall adjust uplink transmission timing for NPUSCH based on the received timing advance command. Like in LTE,
the timing advance command indicates the change of the uplink timing relative to the current uplink timing as multiples
of 16 T s , where T s = 1/(15000 × 2048) s is the time unit for LTE. Transmission of the uplink radio frame from the UE
shall start (N T A + N T A of f set ) × T s seconds before the start of the corresponding downlink radio frame at the UE. Where
N T A is the timing offset between uplink and downlink radio frames at the UE, expressed in T s units, and it is define as
N T A = T A × 16 . The timing advance command, T A , is given be the eNB to the UE in order to properly perform the time
adjustment. If the timing advance command reception ends in the downlink subframe n the uplink transmission timing
adjustment should be applied from the first available NB-IoT uplink slot following the end of n + 12 downlink subframe
and the first available NB-IoT uplink slot for NPUSCH transmission.
This leads to the conclusion that it is possible to compensate a time misalignment among UEs for the uplink transmis-
sion, up to a maximum of 0, 67 ms fo NB-IoT, which is also the maximum supported value for TA in legacy LTE [29], [30],
[32].
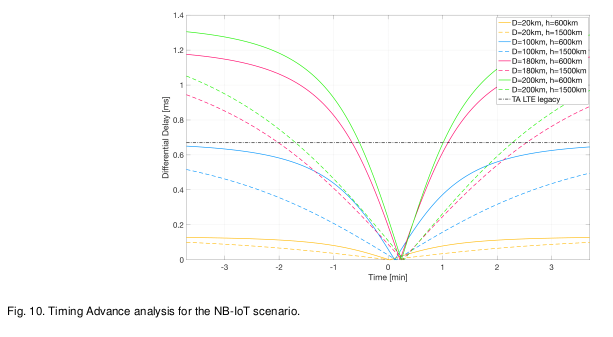
In the reference scenario, the maximum allowed TA must correspond to the maximum difference of the travel time of
signals between UEs and Sat, i.e. in the worst case the travel time difference of the signals of the users at the edge of the
footprint should be under the maximum allowed value for TA. As shown in Figure 10 accordingly to the Sat altitude and
maximum UEs distance inside the footprint, there is a time window such that the worst case differential delay is under the
maximum allowed TA threshold. Performing the transmission inside this time window does not require modification to
the standard. Adding a time offset which takes into account the propagation delay of the satellite channel, depending on
geographical positions of UEs and Sat, could be an alternative solution to overcome the limitation of the TA command..
.
.
Random Access
Generally, the RA procedure for NB-IoT follows the same message flow of LTE and NR, then the already mentioned RA
procedure in [19], [23], [24] will be taken as reference, and the differences will be highlighted in the following.
The main difference comes from the repeated transmission of each message in the RA procedure. In order to serve
UEs in different coverage classes, whom experience different ranges of path loss, the network can configure up to three
Narrowband Physical Random Access Channel (NPRACH) resource configurations in a cell. UE measures its downlink
received signal power to estimate which of the three coverage levels it belongs to. In each configuration, a repetition
value is specified for repeating the messages in the RA procedure as well as the level of transmission power. Furthermore
NB-IoT allows flexible configuration of NPRACH resources in a time-frequency resource grid [29]. NB-IoT supports only
contention-based random access, unlike LTE which allows both contention-based and contention-free procedures. Referring
to the message flow in Figure 5 a UE starts with the transmission of a preamble among one of the 64 available temporary
preambles. The NB-IoT preamble consists of 4 symbol groups, with each symbol group comprising one CP and 5 identical
symbols, the sequence. Only 2 preamble formats are defined for NB-IoT, which both have a sequence duration of 1.333 ms
and differ in their cyclic prefix length, 67 μs for ”Format 0” and 267 μs for ”Format 1” [29]. Each symbol group is transmitted
on a different 3.75 kHz subcarrier then the tone frequency index changes from one symbol group to another, resulting on a
frequency hopping applied on symbol group granularity. The frequency hopping is restricted to 12 contiguous subcarriers
but the hopping scheme is different for each repetition of the preamble. Up to 128 repetitions of preamble are allowed
for each RA attempt, based on the coverage level of the UE [33]. The eNB responds to the request, on the Narrowband
Physical Downlink Control Channel (NPDCCH), with a RAR message. The latter should be received by the UE within a
RA time window between starting after the transmission of the last preamble repetition plus 4 or 64 subframes, in relation
to the repetition number. The maximum duration of the RAR time window is extended, compared to the one of LTE, up to
10.24 s [33]. After the counter expiration, the UE can attempt a new RA procedure, up to 10 tentatives.Then if the maximum
number of tentatives is reached without success, the UE proceeds to the next coverage level, if this level is configured. If
the total number of access attempts is reached, an associated failure is reported to the RRC. With the RAR, the UE gets
a temporary C-RNTI, the timing advance command as well as additional informations, because of the NB-IoT specific
uplink transmission scheme. Then a new formula for deriving Random Access Radio Network Temporary Identifier (RA-
RNTI) is defined [30], [32], [38]. Further, the RAR provides the UL grant necessary for transmission of message 3 over
the Narrowband Physical Uplink Shared Channel (NPUSCH). Then the remaining procedure is done like in LTE, the UE
sends an identification and upon reception of the Contention Resolution indicating that the random access procedure is
successfully finalized. Likewise RAR time window, also the MAC contention resolution timer is extended up to 10.24 s
[28]–[33], [38], [42], [45], [46].
The extension of RAR time windows, among message 1 and 2, and contention resolution timer, among message 3 and
4 up to 10.24 s , allow to cope with the characteristic delay of the satellite channel. Therefore the same RA access procedure
for NB-IoT could be used also in the considered satellite scenario, without requiring any modification to the standard.
HARQ
The Hybrid Automatic Repeat reQuest (HARQ) procedure for NB-IoT is similar to the one in LTE and NR and, therefore,
the already mentioned HARQ procedure in [23], [24] will be taken as reference, with the differences highlighted in the
following.
In order to enable low-complexity UE implementation, NB-IoT allows only one HARQ process, rather then 8 parallel
process of LTE, in both downlink and uplink, and allows longer UE decoding time for both Narrowband Physical
Downlink Control Channel (NPDCCH) and Narrowband Physical Downlink Shared Channel (NPDSCH). From Release 14,
if supported, it is also possible to enable 2 parallel HARQ processes at the MAC entity, in both uplink and downlink, [30].
An asynchronous, adaptive HARQ procedure is adopted to support scheduling flexibility. In order to schedule downlink
data or uplink data the eNB conveys a scheduling command through a Downlink Control Indicator (DCI), carried by
Narrowband Physical Downlink Control Channel (NPDCCH). DCI could be repeated in order to achieve further coverage
enhancement. Repetitions are sent in contiguous suframes and each repetition occupies one subframe. For what concern the
downlink, in order to cope with the reduced computing capabilities of NB-IoT devices, the time offset between NPDCCH
and the associated NPDSCH is at least 4 ms ,instead to schedule the latter in the same TTI as it is for legacy LTE [30]. After
receiving NPDSCH, the UE needs to send back a HARQ acknowledgment using NPUSCH Format 2, which is scheduled
at least 12 ms after receiving NPDSCH, for the sake of reduced complexity constraints. Similarly, for the uplink the time
offset between the end of NPDCCH and the beginning of the associated NPUSCH is at least 8 ms [30].After completing
the NPUSCH transmission, the UE does not expect the reception of the associated HARQ acknowledgment before 3 ms
[30].These relaxed time constraints allow ample decoding time for the UE. The resources to be allocated, as well as the
precise time offsets are indicated in the DCI.
In LTE a HARQ process is associated with a Transport Block (TB) in a given TTI. Due to the multiple retransmissions
for the coverage enhancement, the HARQ entity in NB-IoT invokes the same HARQ process for each retransmission that
is part of the same bundle. Within a bundle the retransmissions are non-adaptive and are triggered without waiting for
feedback from previous transmissions according to the maximum number of repetitions established for that coverage level.
A downlink assignment or an uplink grant, for downlink and uplink HARQ operations respectively, corresponding to a17
new transmission or a retransmission of the bundle, is received after the last repetition of the bundle. If a NACK is received
and a retransmission is required, then the whole bundle is retransmitted [30], [32], [33], [42].
6
C ONCLUSIONS
In this paper, moving from the architecture and deployment options currently being discussed within 3GPP standardisation
activities for Non-Terrestrial Networks, we assessed the impact of typical satellite channel impairments, i.e., large path
losses, delays, and Doppler shifts, on the New Radio air interface and PHY/MAC procedures for both mobile broadband
and machine type services. In particular, focusing on the enhanced MobileBroadBand scenario, a comparison between
the CP-OFDM and f-OFDM waveform has been discussed in terms of OOBE in the presence of TWTA non-linearities,
showing that, although the f-OFDM waveform provides benefits from the bandwidth point of view, it also has an increased
sensitivity to distortions and larger PAPR. With respect to the PHY and MAC layer procedures, on the one hand the
Random Access and Timing Advance do not pose any peculiar issue thanks to the architecture based on the deployment
of on-ground Relay Nodes. On the other hand, the HARQ procedure is deeply impacted by the large delays and, in
particular, these values might require a significantly larger number of parallel HARQ processes, which also affects the
soft buffer sizes. Different solutions are proposed to keep the number of HARQ processes and buffer size under control.
As for the NB-IoT service, the system architecture does not include Relay Nodes and, thus, the impact of large Doppler
shifts is a limiting factor. To circumvent this challenge, a Frequency Advance procedure has been proposed. With respect
to the large delays, been shown that the Random Access and HARQ procedures can operate with no modifications, while
the Timing Advance procedure might pose technical challenges only when the information transmission is scheduled
outside a specific time window. Future studies will include further analyses on the PHY/MAC procedures, also taking
into account additional parameters and algorithms specifications from the standardisation, and the inclusion of non-linear
compensation techniques for the f-OFDM waveform.
A CKNOWLEDGMENTS
This work has been supported by European Space Agency (ESA) funded activity SatNEx IV CoO2-PART 1 WI1 5G Access
Solutions Assessment for Satellite Scenarios. Opinions, interpretations, recommendations and conclusions presented in this
paper are those of the authors and are not necessarily endorsed by the European Space Agency.
R EFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
5GPPP, “5G Empowering Vertical Industries,” Feb. 2016. Available at: https://5g-ppp.eu/roadmaps/
5GPPP, “5G Innovations for new Business Opportunities,” Mar. 2017. Available at: https://5g-ppp.eu/roadmaps/
3GPP TR 38.913 “Study on Scenarios and Requirements for Next Generation Access Technologies; (Release 14),” Jun. 2017.
3GPP R1-171450, “Study on NR to support Non-Terrestrial Networks,” 3GPP TSG#76, Jun. 2017.
3GPP TS 38.811 “Study on New Radio (NR) to support non terrestrial networks (Release 15),” Dec. 2017.
H2020-ICT-2014-1 Project VITAL, Deliverable D2.3, “System Architecture: Final Report,” June 2016.
https://artes.esa.int/news/esa-live-testbed-satellite-terrestrial-integration-context-5g
H2020-ICT-2014-1 Project SANSA, Deliverable D2.3, “Definition of reference scenarios, overall system architectures, research challenges,
requirements and KPIs,” January 2016. Available at: http://www.sansa-h2020.eu/deliverables
F. Bastia et al., “LTE Adaptation for Mobile Broadband Satellite Networks,” EURASIP Journal on Wireless Communications and Networking,
Nov. 2009.
G. Araniti, M. Condoluci, and A. Petrolino, “Efficient Resource Allocation for Multicast Transmissions in Satellite-LTE Network,” in IEEE
Glob. Comm. Conf. (GLOBECOM), Dec. 2013.
M. Amadeo, G. Araniti, A. Iera, and A. Molinaro, “A Satellite-LTE network with delay-tolerant capabilities: design and performance
evaluation,” in IEEE Vehic. Tech. Conf. (VTC Fall), Sep. 2011.
A. Guidotti et al., “Satellite-Enabled LTE Systems in LEO Constellations,” in IEEE International Conference on Communications, 1st International
Workshop on Satellite Communications – Challenges and Integration in the 5G ecosystem, May 2017.
A. Guidotti, A. Vanelli-Coralli, T. Foggi, G. Colavolpe, M. Caus, J. Bas, S. Cioni, and A. Modenini, “LTE-based Satellite Communications in
LEO Mega-Constellations,” submitted to Submitted to IJSCN Special Issue on SatNEx IV, Nov. 2017. Available at: https://arxiv.org/abs/1711.
07689
O. Kodheli, A. Guidotti, and A. Vanelli-Coralli, “Integration of Satellites in 5G through LEO Constellations,” IEEE Glob. Comm. Conf.
(GLOBECOM), Dec. 2017.
A. Guidotti, A. Vanelli-Coralli, O. Kodheli, G. Colavolpe, and T. Foggi, “Integration of 5G Technologies in LEO Mega-Constellations,”
accepted for publication on IEEE 5G Tech Focus. Available at: https://arxiv.org/abs/1709.05807
ETSI EN 302 307-2, “Digital Video Broadcasting (DVB); Second generation framing structure, channel coding and modulation systems for
Broadcasting, Interactive Services, News Gathering and other broadband satellite applications; Part 2: DVB-S2 Extensions (DVB-S2X),” Feb.
2015.
ETSI TS 101 545-1, “Digital Video Broadcasting (DVB); Second Generation DVB Interactive Satellite System (DVB-RCS2); Part 1: Overview
and System Level specification,” Apr. 2014.
3GPP TS 38.211 “Physical channels and modulation (Release 15),” Dec. 2017.
A. Ijaz, L. Zhang, P. Xiao, and R. Tafazolli, “Analysis of Candidate Waveforms for 5G Cellular Systems, Towards 5G Wireless Networks – A
Physical Layer Perspective,” Dr. Hossein Khaleghi Bizaki (Ed.), InTech, 2016, DOI: 10.5772/66051. Available at: https://www.intechopen.com/
books/towards-5g-wireless-networks-a-physical-layer-perspective/analysis-of-candidate-waveforms-for-5g-cellular-systems
Xi Zhang, et al., “Filtered-OFDM – Enabler for Flexible Waveform in The 5th Generation Cellular Networks,” IEEE Globecom, Dec. 2015.
ESA, TM-S2 Channel Model Group, “DVBSX Channel Models,” Jan. 2013.
3GPP TS 38.213 “Physical layer procedures for control (Release 15),” Dec. 2017.
3GPP TS 38.321 “Medium Access Control (MAC) protocol specification (Release 15),” Dec. 2017.18
[25]
[26]
[27]
[28]
[29]
[30]
[31]
[32]
[33]
[34]
[35]
[36]
[37]
[38]
[39]
[40]
[41]
[42]
[43]
[44]
[45]
[46]
3GPP TS 38.331 “Radio Resource Control (RRC) protocol specification (Release 15),” Dec. 2017.
3GPP TS 38.133 “Requirements for support of radio resource management (Release 15),” Dec. 2017.
3GPP R1-1704463, “Considerations on CB grouping for multiple HARQ ACK/NACK bits per TB,” 3GPP TSG RAN1#88bis, Apr. 2017.
3GPP TS 36.101, “User Equipment (UE) radio transmission and reception (Release 14),” Jun 2017.
3GPP TS 36.211, “Physical Channels and Modulation (Release 14),” Mar 2017.
3GPP TS 36.213, “Physical layer procedures (Release 14),” Jun 2017.
3GPP TS 36.304, “User Equipment (UE) procedures in idle mode (Release 14),” Jun 2017.
3GPP TS 36.321, “Medium Access Control (MAC) protocol specification (Release 14),” Jun 2017.
3GPP TS 36.331, “Radio Resource Control (RRC) protocol specification (Release 14),” Apr 2017.
3GPP TS 36.212, “Multiplexing and channel coding (Release 14),” Jun 2017.
3GPP TR 25.913, “Requirements for Evolved UTRA (E-UTRA) and Evolved UTRAN (E-UTRA) (Realease 9),” Dec 2009.
3GPP TR 45.820, “Cellular system support for ultra-low complexity and low throughput Internet of Things (CIoT) (Release 13),” Nov 2015.
Qualcomm Inc., “Narrowband IoT (NB-IoT),” RP-151621, 3GPP TSG RAN Meeting #69, Sep 2015.
Rapeepat Ratasuk, Nitin Mangalvedhe, Yanji Zhang, Michel Robert, Jussi-Pekka Koskinen, “Overview of narrowband IoT in LTE Rel-13,”
Standards for Communications and Networking (CSCN), 2016 IEEE Conference on, Oct. 2016.
V. Jungnickel, M. Schellmann, A. Forck, H. Gbler, S. Wahls, A. Ibing, K. Manolakis, T. Haustein, W. Zirwas, J. Eichinger, E. Schulz, C. Juchems,
F. Luhn, R. Zavrtak, “Demonstration of Virtual Mimo in the Uplink,” Proc. IET Smart Antennas and Cooperative Communications Seminar, Oct.
2007.
Volker Jungnickel, Holger Gaebler, Udo Krueger, Konstantinos Manolakis, Thomas Haustein, “LTE trials in the return channel over satellite,”
Advanced Satellite Multimedia Systems Conference (ASMS) and 12th Signal Processing for Space Communications Workshop (SPSC), 2012 6th, Sep
2012.
Nitin Mangalvedhe, Rapeepat Ratasuk, Amitava Ghosh, “NB-IoT deployment study for low power wide area cellular IoT,” Personal, Indoor,
and Mobile Radio Communications (PIMRC), 2016 IEEE 27th Annual International Symposium on, Sep. 2016.
Y.P. Eric Wang, Xingqin Lin, Ansuman Adhikary, Asbjorn Grovlen, Yutao Sui, Yufei Blankenship, Johan Bergman, Hazhir S. Razaghi, “A
Primer on 3GPP Narrowband Internet of Things,” IEEE Communications Magazine, Mar. 2017.
I. Ali, N. Al-Dhahir, J.E. Hershey, “Doppler characterization for LEO satellites,” IEEE Transactions on Communications, Mar 1998.
Changsheng Yu, Li Yu, Yuan Wu, Yanfei He, Qun Lu, “Uplink Scheduling and Link Adaptation for Narrowband Internet of Things Systems,”
IEEE Access, 2017.
J. Schlienz, D. Raddino, “Narrowband Internet of Things Whitepaper,” Rohde & Schwarz Whitepaper. Available at: http://www.rohde-
schwarz.com/appnote/1MA266.
Huawei Technologies Co., “NB-IoT Radio and Performance Basics Feature Parameter Description,” Aug 2017.

Ufffff……………….
Dennoch DANKE für die Mühe der Dokumentation hier auf BB !
LikeLike
Hat dies auf haluise rebloggt.
LikeLike
Hat dies auf Menschenkind rebloggt.
LikeLike